Twin Delayed Deep Deterministic Policy Gradient (TD3)
Overview
TD3 is a popular DRL algorithm for continuous control. It extends DDPG with three techniques: 1) Clipped Double Q-Learning, 2) Delayed Policy Updates, and 3) Target Policy Smoothing Regularization. With these three techniques TD3 shows significantly better performance compared to DDPG.
Original paper:
Reference resources:
Implemented Variants
| Variants Implemented | Description |
|---|---|
td3_continuous_action.py, docs |
For continuous action space |
td3_continuous_action_jax.py, docs |
For continuous action space |
Below are our single-file implementations of TD3:
td3_continuous_action.py
The td3_continuous_action.py has the following features:
- For continuous action space
- Works with the
Boxobservation space of low-level features - Works with the
Box(continuous) action space
Usage
poetry install
poetry install -E mujoco
poetry run python cleanrl/td3_continuous_action.py --help
poetry run python cleanrl/td3_continuous_action.py --env-id Hopper-v4
pip install -r requirements/requirements-mujoco.txt
python cleanrl/td3_continuous_action.py --help
python cleanrl/td3_continuous_action.py --env-id Hopper-v4
Explanation of the logged metrics
Running python cleanrl/td3_continuous_action.py will automatically record various metrics such as various losses in Tensorboard. Below are the documentation for these metrics:
charts/episodic_return: episodic return of the gamecharts/SPS: number of steps per secondlosses/qf1_loss: the MSE between the Q values at timestep \(t\) and the target Q values at timestep \(t+1\), which minimizes temporal difference.losses/actor_loss: implemented as-qf1(data.observations, actor(data.observations)).mean(); it is the negative average Q values calculated based on the 1) observations and the 2) actions computed by the actor based on these observations. By minimizingactor_loss, the optimizer updates the actors parameter using the following gradient (Fujimoto et al., 2018, Algorithm 1)2:
losses/qf1_values: implemented as `qf1(data.observations, data.actions).view(-1); it is the average Q values of the sampled data in the replay buffer; useful when gauging if under or over esitmations happen
Implementation details
Our td3_continuous_action.py is based on the TD3.py from sfujim/TD3. Our td3_continuous_action.py presents the following implementation differences.
-
td3_continuous_action.pyuses a two separate objectsqf1andqf2to represents the two Q functions in the Clipped Double Q-learning architecture, whereasTD3.py(Fujimoto et al., 2018)2 uses a singleCriticclass that contains both Q networks. That said, these two implementations are virtually the same. -
td3_continuous_action.pyalso adds support for handling continuous environments where the lower and higher bounds of the action space are not \([-1,1]\), or are asymmetric. The case where the bounds are not \([-1,1]\) is handled inTD3.py(Fujimoto et al., 2018)2 as follows:On the other hand, inclass Actor(nn.Module): ... def forward(self, state): a = F.relu(self.l1(state)) a = F.relu(self.l2(a)) return self.max_action * torch.tanh(self.l3(a)) # Scale from [-1,1] to [-action_high, action_high]CleanRL's td3_continuous_action.py, the mean and the scale of the action space are computed asaction_biasandaction_scalerespectively. Those scalars are in turn used to scale the output of atanhactivation function in the actor to the original action space range:class Actor(nn.Module): def __init__(self, env): ... # action rescaling self.register_buffer("action_scale", torch.FloatTensor((env.action_space.high - env.action_space.low) / 2.0)) self.register_buffer("action_bias", torch.FloatTensor((env.action_space.high + env.action_space.low) / 2.0)) def forward(self, x): x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = torch.tanh(self.fc_mu(x)) return x * self.action_scale + self.action_bias # Scale from [-1,1] to [-action_low, action_high]
Additionally, when drawing exploration noise that is added to the actions produced by the actor, CleanRL's td3_continuous_action.py centers the distribution the sampled from at action_bias, and the scale of the distribution is set to action_scale * exploration_noise.
Info
Note that Humanoid-v2, InvertedPendulum-v2, Pusher-v2 have action space bounds that are not the standard [-1, 1]. See below and PR #196
Ant-v2 Observation space: Box(-inf, inf, (111,), float64) Action space: Box(-1.0, 1.0, (8,), float32)
HalfCheetah-v2 Observation space: Box(-inf, inf, (17,), float64) Action space: Box(-1.0, 1.0, (6,), float32)
Hopper-v2 Observation space: Box(-inf, inf, (11,), float64) Action space: Box(-1.0, 1.0, (3,), float32)
Humanoid-v2 Observation space: Box(-inf, inf, (376,), float64) Action space: Box(-0.4, 0.4, (17,), float32)
InvertedDoublePendulum-v2 Observation space: Box(-inf, inf, (11,), float64) Action space: Box(-1.0, 1.0, (1,), float32)
InvertedPendulum-v2 Observation space: Box(-inf, inf, (4,), float64) Action space: Box(-3.0, 3.0, (1,), float32)
Pusher-v2 Observation space: Box(-inf, inf, (23,), float64) Action space: Box(-2.0, 2.0, (7,), float32)
Reacher-v2 Observation space: Box(-inf, inf, (11,), float64) Action space: Box(-1.0, 1.0, (2,), float32)
Swimmer-v2 Observation space: Box(-inf, inf, (8,), float64) Action space: Box(-1.0, 1.0, (2,), float32)
Walker2d-v2 Observation space: Box(-inf, inf, (17,), float64) Action space: Box(-1.0, 1.0, (6,), float32)
Experiment results
To run benchmark experiments, see benchmark/td3.sh. Specifically, execute the following command:
| benchmark/td3.sh | |
|---|---|
1 2 3 4 5 6 7 | |
Below are the average episodic returns for td3_continuous_action.py (3 random seeds). To ensure the quality of the implementation, we compared the results against (Fujimoto et al., 2018)2.
| Environment | td3_continuous_action.py |
TD3.py (Fujimoto et al., 2018, Table 1)2 |
|---|---|---|
| HalfCheetah-v4 | 9583.22 ± 126.09 | 9636.95 ± 859.065 |
| Walker2d-v4 | 4057.59 ± 658.78 | 4682.82 ± 539.64 |
| Hopper-v4 | 3134.61 ± 360.18 | 3564.07 ± 114.74 |
| InvertedPendulum-v4 | 968.99 ± 25.80 | 1000.00 ± 0.00 |
| Humanoid-v4 | 5035.36 ± 21.67 | not available |
| Pusher-v4 | -30.92 ± 1.05 | not available |
Info
Note that td3_continuous_action.py uses gym MuJoCo v4 environments while TD3.py (Fujimoto et al., 2018)2 uses the gym MuJoCo v1 environments.
Also note the performance of our td3_continuous_action.py seems to be worse than the reference implementation on Walker2d. This is likely due to openai/gym#938. We would have a hard time reproducing gym MuJoCo v1 environments because they have been long deprecated.
One other thing could cause the performance difference: the original code reported the average episodic return using determinisitc evaluation (i.e., without exploration noise), see sfujim/TD3/main.py#L15-L32, whereas we reported the episodic return during training and the policy gets updated between environments steps.
Learning curves:
| benchmark/td3_plot.sh | |
|---|---|
1 2 3 4 5 6 7 8 9 | |
Tracked experiments and game play videos:
td3_continuous_action_jax.py
The td3_continuous_action_jax.py has the following features:
- Uses Jax, Flax, and Optax instead of
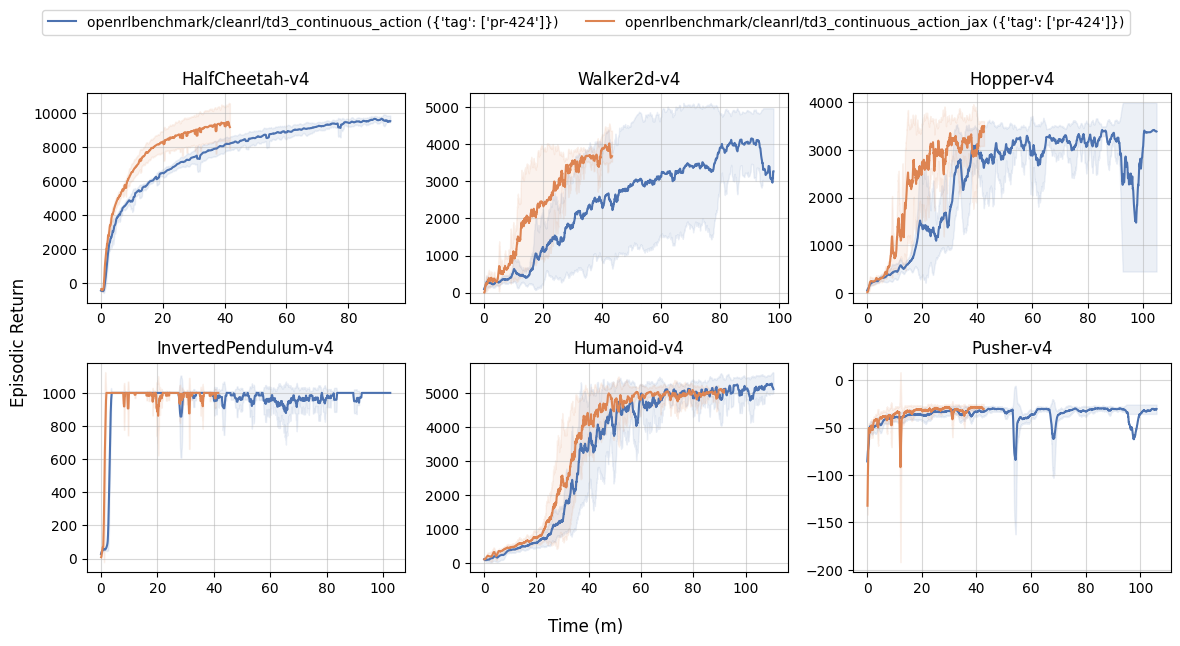
torch. td3_continuous_action_jax.py is roughly 2.5-4x faster than td3_continuous_action.py - For continuous action space
- Works with the
Boxobservation space of low-level features - Works with the
Box(continuous) action space
Usage
poetry install
poetry install -E "mujoco jax"
poetry run python cleanrl/td3_continuous_action_jax.py --help
poetry run python cleanrl/td3_continuous_action_jax.py --env-id Hopper-v4
pip install -r requirements/requirements-mujoco.txt
pip install -r requirements/requirements-jax.txt
python cleanrl/td3_continuous_action_jax.py --help
python cleanrl/td3_continuous_action_jax.py --env-id Hopper-v4
Explanation of the logged metrics
See related docs for td3_continuous_action.py.
Implementation details
See related docs for td3_continuous_action.py.
Experiment results
To run benchmark experiments, see benchmark/td3.sh. Specifically, execute the following command:
| benchmark/td3.sh | |
|---|---|
1 2 3 4 5 6 7 8 | |
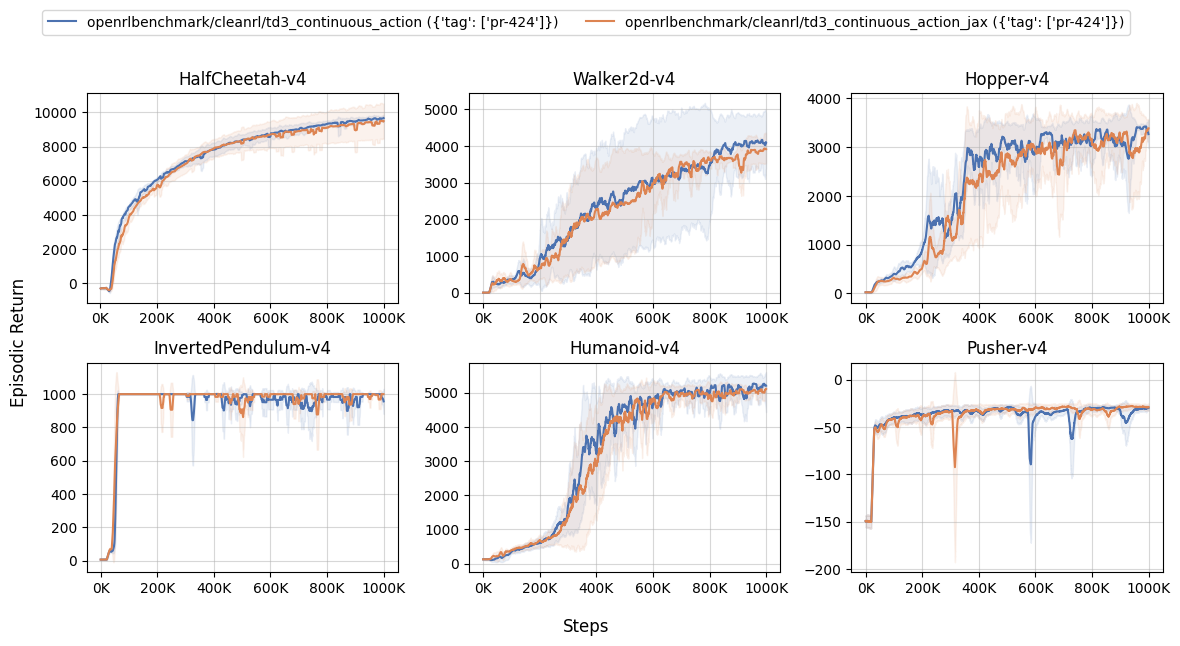
Below are the average episodic returns for td3_continuous_action_jax.py (3 random seeds).
| openrlbenchmark/cleanrl/td3_continuous_action ({'tag': ['pr-424']}) | openrlbenchmark/cleanrl/td3_continuous_action_jax ({'tag': ['pr-424']}) | |
|---|---|---|
| HalfCheetah-v4 | 9583.22 ± 126.09 | 9345.93 ± 770.54 |
| Walker2d-v4 | 4057.59 ± 658.78 | 3686.19 ± 141.23 |
| Hopper-v4 | 3134.61 ± 360.18 | 2940.10 ± 655.63 |
| InvertedPendulum-v4 | 968.99 ± 25.80 | 988.94 ± 8.86 |
| Humanoid-v4 | 5035.36 ± 21.67 | 5033.22 ± 122.14 |
| Pusher-v4 | -30.92 ± 1.05 | -29.18 ± 1.02 |
Learning curves:
| benchmark/td3_plot.sh | |
|---|---|
1 2 3 4 5 6 7 8 9 10 | |
Info
These are some previous experiments with TPUs. Note the results are very similar to the ones above, but the runtime can be different due to different hardware used.
Note that the experiments were conducted on different hardwares, so your mileage might vary. This inconsistency is because 1) re-running expeirments on the same hardware is computationally expensive and 2) requiring the same hardware is not inclusive nor feasible to other contributors who might have different hardwares.
That said, we roughly expect to see a 2-4x speed improvement from using td3_continuous_action_jax.py under the same hardware. And if you disable the --capture_video overhead, the speed improvement will be even higher.
Learning curves:






Tracked experiments and game play videos:
-
Lillicrap, T.P., Hunt, J.J., Pritzel, A., Heess, N.M., Erez, T., Tassa, Y., Silver, D., & Wierstra, D. (2016). Continuous control with deep reinforcement learning. CoRR, abs/1509.02971. https://arxiv.org/abs/1509.02971 ↩
-
Fujimoto, S., Hoof, H.V., & Meger, D. (2018). Addressing Function Approximation Error in Actor-Critic Methods. ArXiv, abs/1802.09477. https://arxiv.org/abs/1802.09477 ↩↩↩↩↩↩